

面对国内机器人产业的快速发展,本项目团队依据多年的研究基础,在国内率先提出高性能灵巧关节臂开源研发平台这一概念。
该开源研发平台选取垂直六关节机器人与模块化机器人两类本体,将首次公开产品机器人本体的 D-H 参数、机械传动参数、电机及电气系统参数等核心物 理量,为客户开展自己的机器人控制策略提供模型支撑。在硬件体系上,采用基于 EtherCAT 实时工业以太网总线的开放式机器人运动控制平台架构。该架构采 用通用硬件+软 PLC 结构。在编程及开发软件平台上,提供 C、C++及符合 IEC-61131-3 标准约定的 ST、LD 等编程语言。在机器人控制理论及方法研究上, 项目团队在前期多种机器人运动学控制方法的基础上,将重点研究灵巧手臂的动 力学控制机理与实现方法,包括不同控制策略下的动力学正反解算法、参数预 测模型、惯量自动辨识方法等,着力解决机器人手臂的高性能动力学控制难题。 同时,本项目在产业化阶段为了能够更好地帮助用户二次开发,我们将在高性能 灵巧关节臂开源研发平台上,首次在业内公开机器人控制核心算法及源代码,并提供完整的教学资料与客户培训,力争与客户建立全方位的项目长期合作。
项目团队也制订了相应的产业化实施路线图,技术研发方面,6 个月内迭代 两轮;宣传方面,参加国家级创新创业大赛、高教装备展;营销方面,先从小批 量应用示范开始,收集市场反馈,获得产品持续的经费支持,争取 1 年后开始全面市场化。(来源: 陕西省科学技术协会)


见字如晤 陕西师范大学连续15年为新生手写录取通知书2021-07-16 17:32:38

“演艺”里的西安:雅乐寻踪 驻华大使夫人与西安共谱文化交流“交响曲”2021-07-11 17:07:56

2021全球驻华使节西安经贸文化之旅走进白鹿原影视城2021-05-16 16:43:35

“八办”纪念馆要不忘初心、牢记使命、服务发展、开拓创新,持续做好革命文物的保护和利用工作,奋力谱写“八办”纪念馆文物保护利用的新篇章。2019-11-19 17:56:45

从刘家洼考古队获悉,考古队发掘出土了大量的珍贵文物,首次发现了关中地区罕见的金权杖以及山形簋。2019-11-15 10:13:13

本次展览以“光化六合”为主题,意为“道德教化遍及天下”,以十六国末期至隋统一全国之前的历史演进为线索,以于右任先生“鸳鸯七志斋藏石”中的北朝墓志和拓片为核心展品2019-11-11 14:47:29

宝鸡市千阳县第四届西秦刺绣香包节开幕2021-06-06 16:19:42

丝路欢乐世界主题角色动画Miracle(《奇迹》)预告片正式发布2021-05-27 19:22:11

银川市首批“畅游西咸新区”旅游团打卡西咸2021-05-21 11:33:32
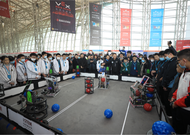
VEX机器人亚洲公开赛在西咸新区泾河新城开幕2021-04-03 16:19:01

“中国到处都有意思,我很喜欢中国文化。”这是现就读长安大学的土库曼斯坦籍留学生张依娜来到陕西后的真切感受,也是她选择来中国留学的主要原因。2019-11-20 18:03:02

位于陕西关中平原西部的宝鸡,是华夏始姐炎帝的诞生地,也是周秦王朝的发祥地。2019-11-11 09:47:27
1、“国际在线”由中国国际广播电台主办。经中国国际广播电台授权,国广国际在线网络(北京)有限公司独家负责“国际在线”网站的市场经营。
2、凡本网注明“来源:国际在线”的所有信息内容,未经书面授权,任何单位及个人不得转载、摘编、复制或利用其他方式使用。
3、“国际在线”自有版权信息(包括但不限于“国际在线专稿”、“国际在线消息”、“国际在线XX消息”“国际在线报道”“国际在线XX报道”等信息内容,但明确标注为第三方版权的内容除外)均由国广国际在线网络(北京)有限公司统一管理和销售。
已取得国广国际在线网络(北京)有限公司使用授权的被授权人,应严格在授权范围内使用,不得超范围使用,使用时应注明“来源:国际在线”。违反上述声明者,本网将追究其相关法律责任。
任何未与国广国际在线网络(北京)有限公司签订相关协议或未取得授权书的公司、媒体、网站和个人均无权销售、使用“国际在线”网站的自有版权信息产品。否则,国广国际在线网络(北京)有限公司将采取法律手段维护合法权益,因此产生的损失及为此所花费的全部费用(包括但不限于律师费、诉讼费、差旅费、公证费等)全部由侵权方承担。
4、凡本网注明“来源:XXX(非国际在线)”的作品,均转载自其它媒体,转载目的在于传递更多信息,丰富网络文化,此类稿件并不代表本网赞同其观点和对其真实性负责。
5、如因作品内容、版权和其他问题需要与本网联系的,请在该事由发生之日起30日内进行。
地址:北京市石景山区石景山路乙18号院万达广场A座15层 邮政编码:100040
 中国互联网举报中心 违法和不良信息举报电话:010-67401009 举报邮箱:jubao@cri.cn 新闻从业人员职业道德监督电话:010-67401111 监督邮箱:jiancha@cri.cn
中国互联网举报中心 违法和不良信息举报电话:010-67401009 举报邮箱:jubao@cri.cn 新闻从业人员职业道德监督电话:010-67401111 监督邮箱:jiancha@cri.cn
中国互联网视听节目服务自律公约 信息网络传播视听节目许可证 0102002 京ICP证120531号 京ICP备05064898号  京公网安备 11040102700187号
京公网安备 11040102700187号
互联网新闻信息服务许可证10120170005
网站运营:国广国际在线网络(北京)有限公司
中央广播电视总台国际在线版权所有©1997- 未经书面授权禁止复制或建立镜像
![]()
